Tuffwing, a manufacturer of affordable aerial mapping systems recently performed integration of Emlid Reach RTK to enable making precision maps without use of ground control points. The system was benchmarked by comparing direct georeferenced model with a set of GCPs, used solely for error detection purposes. Achieved lateral RMS error is just 4cm according to the Pix4D quality report.
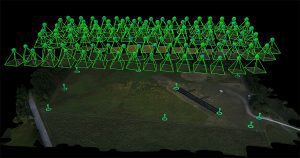
3D map georeferenced with Reach GPS data

Possible setup for surveying drone with Reach RTK and Tuffwing hot shoe.
The key feature of the setup is use of Reach RTK and Tuffwing/Reach RTK hot shoe cable together connected to the camera’s hot shoe (Fig.2). This cable powers Reach rover, triggers camera from Pixhawk and directs flash sync pulses to Reach. Exact moment of each pulse is stored as time mark in the Reach RINEX files. No configuration for the Reach hot shoe cable is required, the camera will automatically trigger the hot shoe and the Reach will automatically record events down to fractions of a millisecond. This process does not require communication between autopilot and RTK receiver.
After the flight the time marks are converted into geotags with a free RTKLIB software provided by Emlid and are used for direct georeferencing of images. Commercial software such as Grafnav will be efficient as well.
To validate performance of the system Tuffwing organized flights using their Tuffwing UAV Mapper drone with Reach RTK GPS onboard. 112 photos were acquired with a Sony Nex 5T with Sony 16mm lens triggered by a Pixhawk.
Information about acquired data:
Comparative quality report prepared in Pix4D by Tuffwing was based on geotag file from Reach RTK and GCP-file for validating the accuracy of 3d map. It is showing that the RMS error for Y-direction is about 4 cm while X-direction is less than 3 cm. All the data with detailed manual for processing the report is available, you can find links in the end of the article.
Tuffwing is now working on documentation to show complete data processing workflow.
References:
